Bilinear Value Functions
University of California, Los Angeles
May 2026
This mini research report explores the effect of parameterizing goal-conditioned value functions with a low-rank approximation consisting of the inner (dot) product between two vectors:
$$Q(s,a,g) = \phi(s,a)^\top \psi(g)$$where $\phi(s,a)$ and $\psi(g)$ represent “what happens next” and “where to go next,” respectively. The choice of goal representation can alternatively be conditioned on the state as well, taking the form $\psi(s,g)$ as done in Hong, Yang, & Agrawal (2022).
This inner product parameterization has a few nice properties:
- According to the Stone-Weierstrass theorem, any continuous function $f: \mathcal S \times \mathcal S \to \mathbb R$ on a compact topological space $\mathcal S$ can be uniformly approximated by a bilinear function $\phi(s)^\top \psi(g)$. Notably, the norm $\|\phi(s) - \psi(g)\|_p$ does not enjoy these properties, regardless of the choice of $p$.
- It enforces a low-rank structure: any matrix that can be represented as the inner product of two vectors with dimension $d$ has a rank of no more than $d$. Intuitively, high-rank matrices are undesirable because each additional linearly independent column/row carries additional information about the feature space — to prevent overfitting, we desire functions that are sparse/low-rank, so they depend on as few features as possible.
Experiments
We conduct our experiments in OGBench. We simply swap in a bilinear value function (also used in Contrastive RL) for the monolithic value function. We start with two baselines: GCIQL with DDPG+BC, which excels at short-horizon manipulation; and SAW, which is state-of-the-art in long-horizon locomotion. We perform several modifications to each method:
- Swapping the monolithic value function network for a (late fusion) bilinear value function $Q(s,a,g) = \phi(s,a)^\top \psi(g)$.
- Using binary cross-entropy (BCE) loss vs. mean squared error (MSE), where we simply weight the BCE loss by the expectile regression weight.
- Clamping the target Q-value in the critic loss — between $[0,1]$ for the $[0,1]$ formulation, and between $[-1/(1-\gamma), 0]$ for the $[-1, 0]$ formulation.
- Using early fusion with $\phi(s,a)^\top \psi(s,g)$ instead of $\phi(s,a)^\top \psi(g)$ in the bilinear value function.
To quantify performance, we measure:
- the absolute success rate (standard in OGBench)
- average time-to-completion over successful episodes
for GCIQL with DDPG+BC and SAW with GCIVL across cube-single-play,
cube-single-noisy, cube-double-play, cube-double-noisy,
antmaze-medium-navigate, antmaze-large-navigate, and
humanoidmaze-giant-navigate.
We add the second metric due to previous observations that many successful completions (across all algorithms) in OGBench result simply from
state space coverage due to a high time limit: an agent can solve most medium maze environments by simply wandering at random,
and perform several incorrect placements without penalty in cube.
Main takeaways: we see massive improvements in several environments, notably
cube-single-play and antmaze-medium-navigate for GCIQL and
humanoidmaze-giant-navigate for SAW. We find that
the choice of early vs. late fusion of goal information largely depends on the environment. For example, cube
has a very simple state-goal relationship and benefits from the low-rank bottleneck imposed by late fusion, whereas puzzle
demands early state-goal fusion.
Bilinear value functions with late fusion
Speed
We notice a very interesting observation in cube-single-noisy, for which GCIQL
with DDPG+BC was the crème-de-la-crème — achieving 99% success in the
benchmark. When swapping it for the bilinear value function, success decreased marginally
(ranging around 95-97%), but the execution speed improved dramatically (around 20%).
Stability
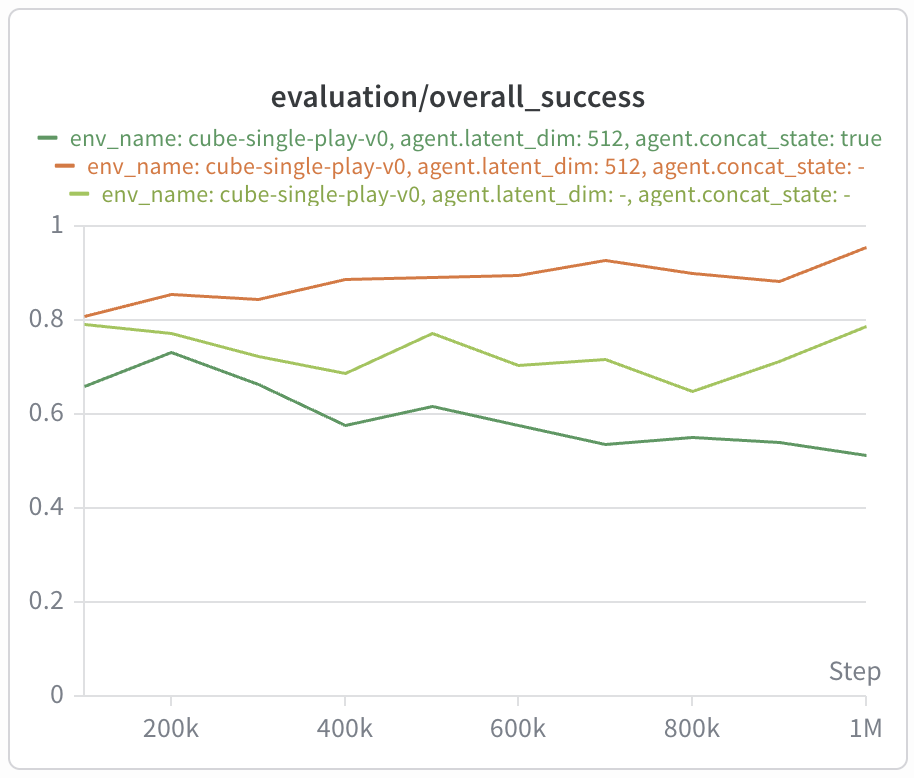
For GCIQL in cube-single-play, we often observed some amount of overfitting
over the course of training (dotted line). However, the bilinear value function seems to
train quite stably and improves with additional training, reaching performance comparable
with cube-single-noisy!

Similar to cube-single-noisy, the execution speed of the resulting policies is
dramatically improved (up to 33% faster)!
Locomotion
We also observe huge improvements in locomotion, where GCIQL previously lagged behind other baselines (need to rerun to measure speed improvements).

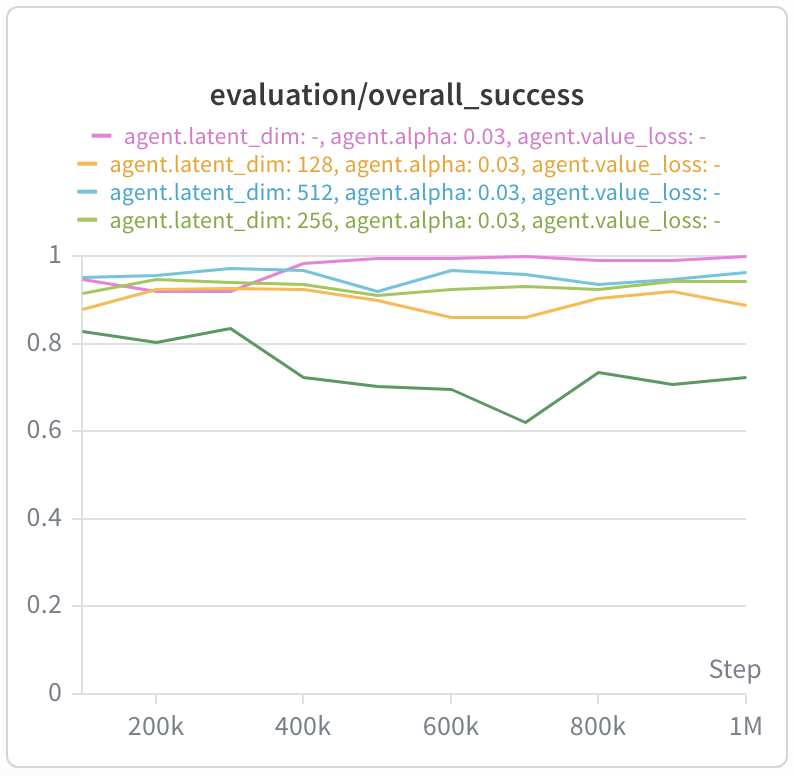
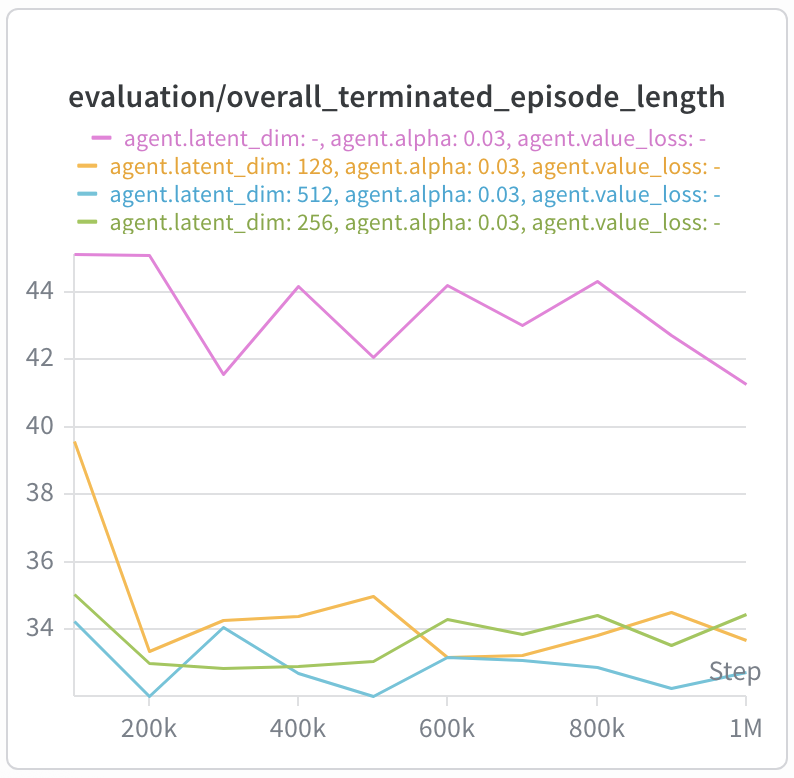
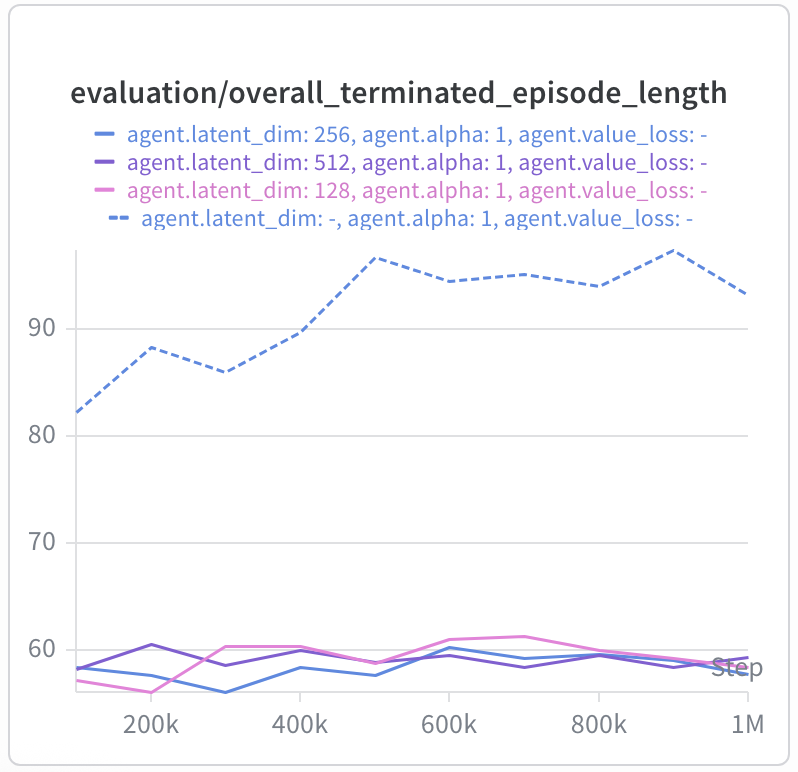
Latent dimension size
As mentioned earlier, the size of the latent dimension constrains the rank of the bilinear value function. We test ranges from $d = [16, 32, 64, 128, 256, 512]$ and generally find that values towards the higher end of the spectrum tend to do better.
Value function divergence
For cube-double-play, we observe that the value function diverges after some
training, leading to collapse in performance and exploding value losses.
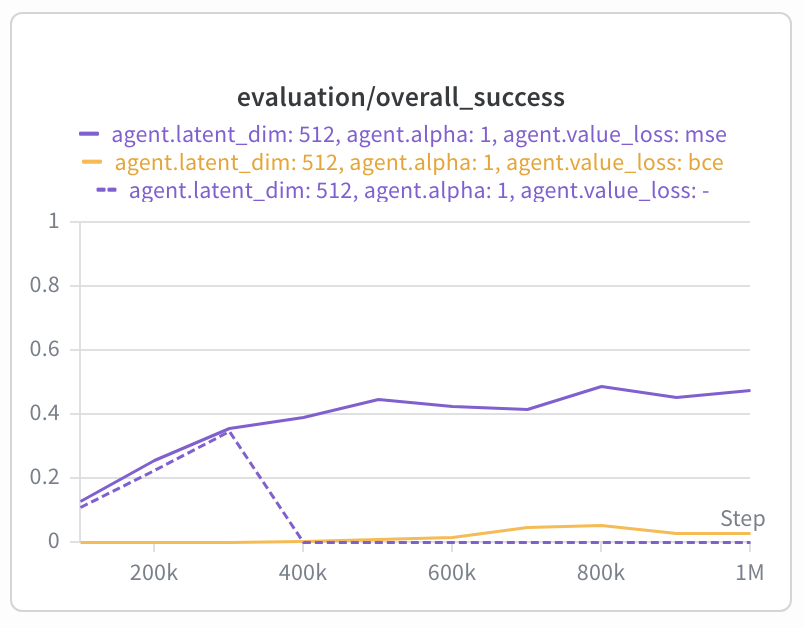
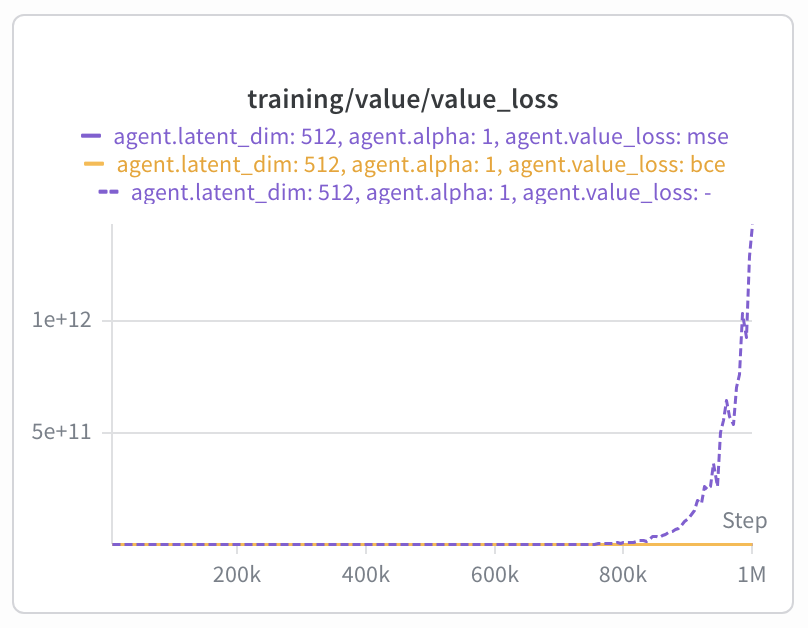
We find that this can be mitigated by clamping the Q-targets to valid ranges (3), rescuing performance. Interestingly, this does not seem to improve performance for the BCE loss.
Horizon scaling
To test the performance of the bilinear value function on long-horizon tasks, we also add it
to SAW, which uses an action-free variant called GCIVL for value learning. Once again, we
simply swap in the bilinear architecture. One of the main results from SAW was the ability
to achieve non-trivial performance on humanoidmaze-giant, the longest-horizon
task in the OGBench suite. We find that adding a bilinear value function more than
doubles the performance of SAW to around 70% success rate:

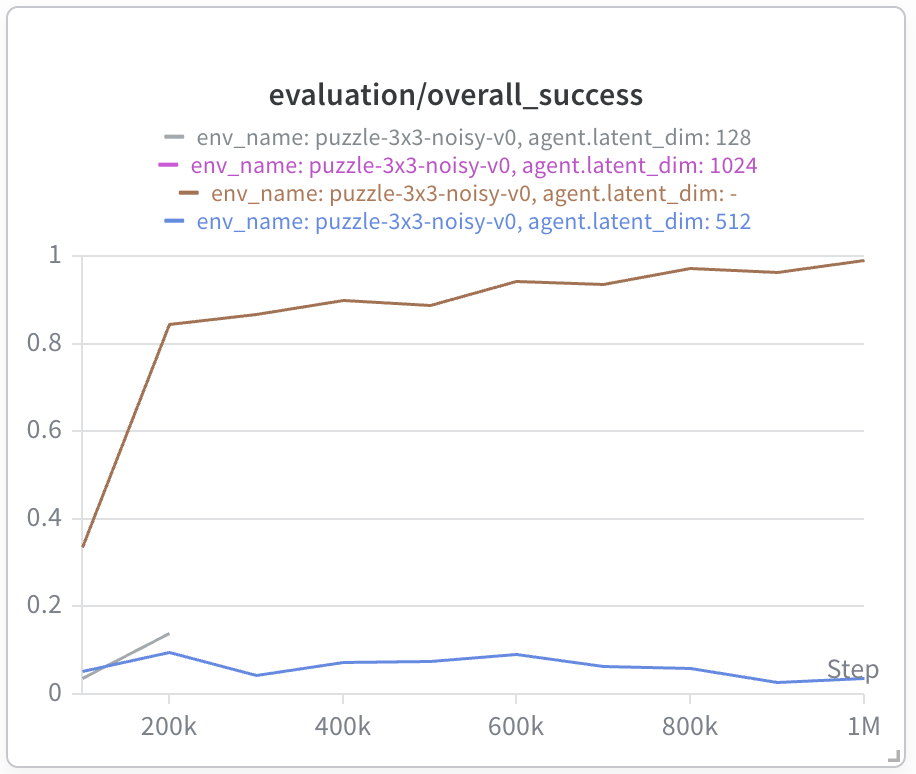
Negative results
Interestingly, the bilinear value function exhibits a significant failure mode in the
puzzle environments, where GCIQL previously excelled. I tested larger latent
dimension sizes (1024, 2048) to ensure that lack of expressivity was not the issue.

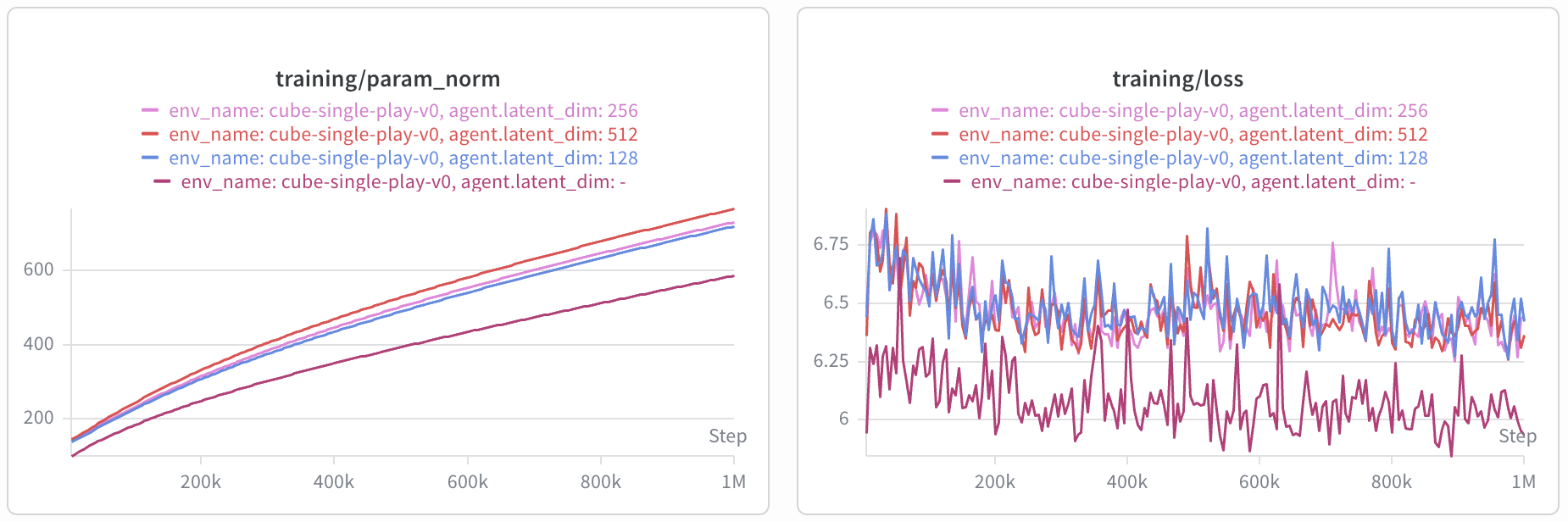
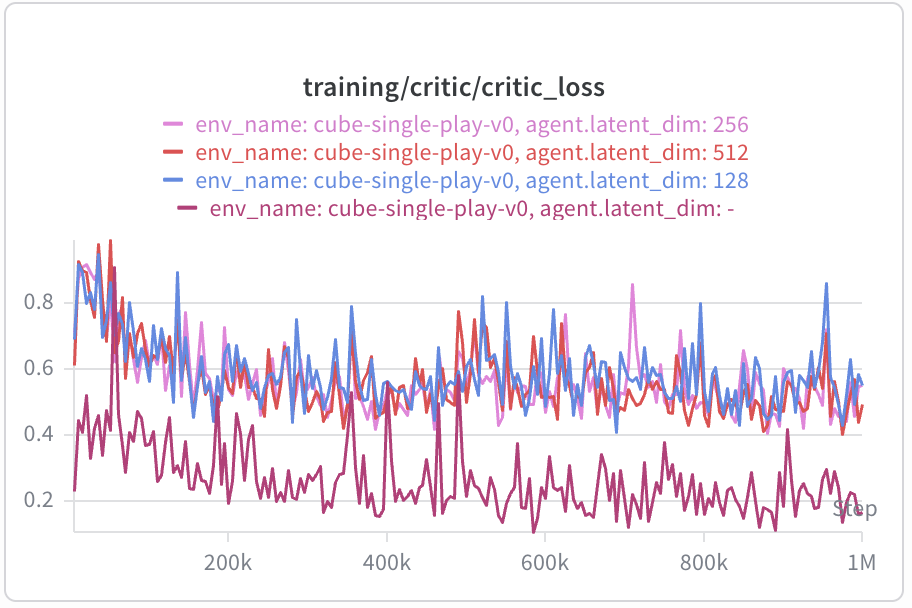
One additional interesting observation is that the parameter norms are significantly higher for BVFs, and the training loss also remains higher — the latter seems to be indicating the effects of the low-rank approximation imposed by the bilinear parameterization.
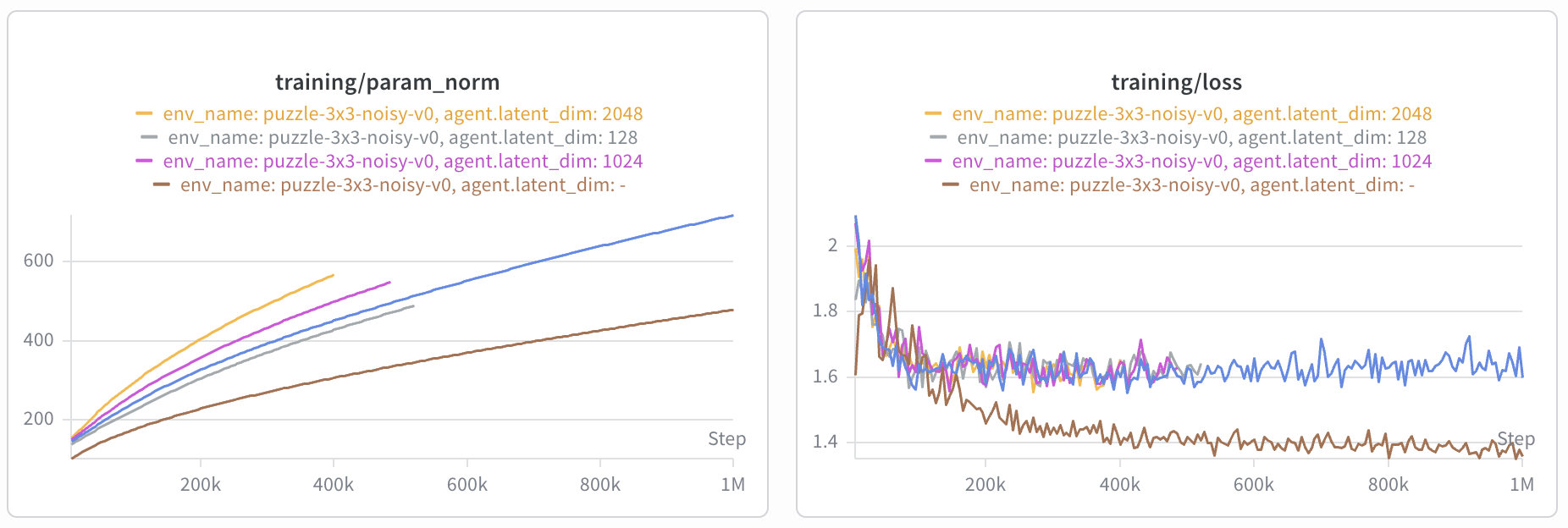
The former might just be a result of needing to learn vectors that produce a large
(negative) inner product (up to $-80$ in just cube-single-play). This is also
observable in the positive results, as seen below:
Hypothesis: late fusion of action with goal information makes the action
gradient more noisy in DDPG+BC, since the target subgoal is highly dependent on the
state-goal relationship in puzzle environments.
The puzzle consists of a two-dimensional array of buttons (e.g., a 4 × 6 grid), where pressing a button toggles the colors of the pressed button and the buttons adjacent to it.
Then, which button should be pressed next depends critically on the current state as well as the goal state, and the relationship described above may be nonlinear — only allowing a bilinear parameterization may cause underfitting as shown by the loss curve below:
On the other hand, much of the relevant information about the optimal action can be
extracted only from state information in cube. For example, if the
cube is not already in the gripper, it will always be the case that the correct action is
to move toward the cube regardless of the goal position (this might also partially explain
the degeneration in multi-cube manipulation scenarios). When the gripper contains the cube,
there need only be a simple function that captures the movement from the current gripper
location to the target location, which can easily be parameterized by a simple inner
product.
To test this hypothesis, we use the state-goal parameterization $\phi(s,a)^\top \psi(s,g)$
instead of $\phi(s,a)^\top \psi(g)$. This dramatically improves performance in
puzzle (even better than the monolithic value function which is already around
95% success for both play and noisy) at the cost of significantly
worse performance in cube-single.

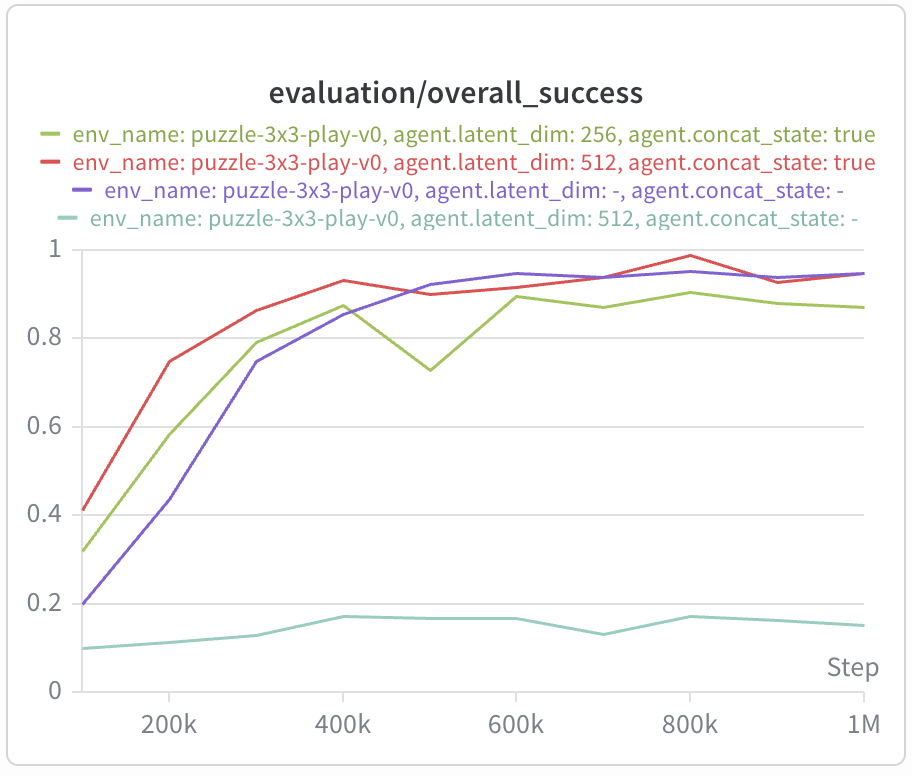
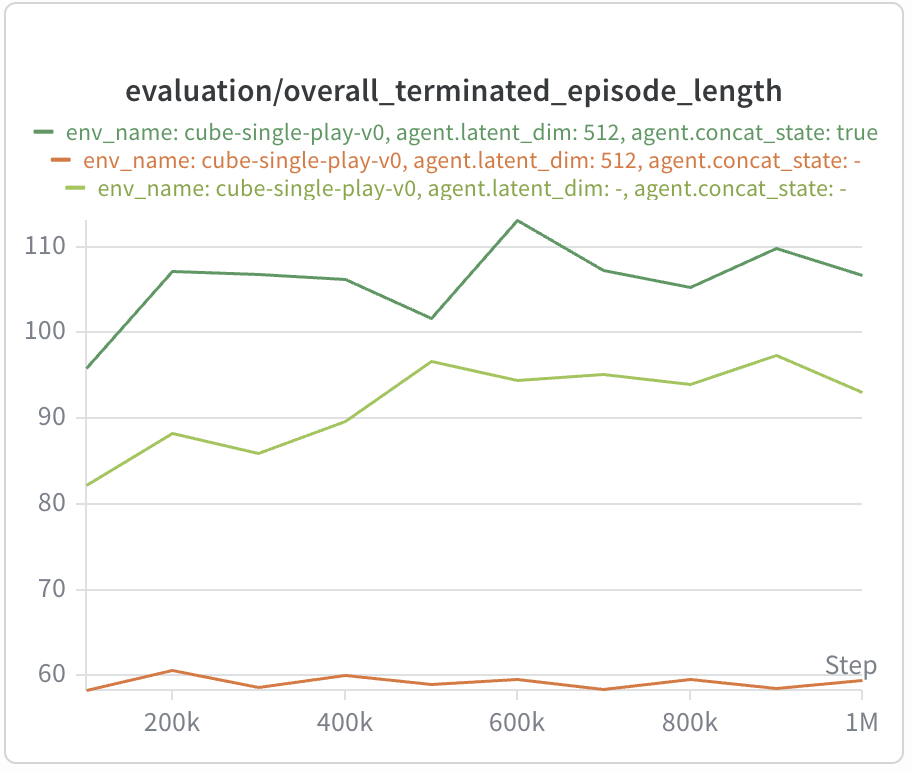
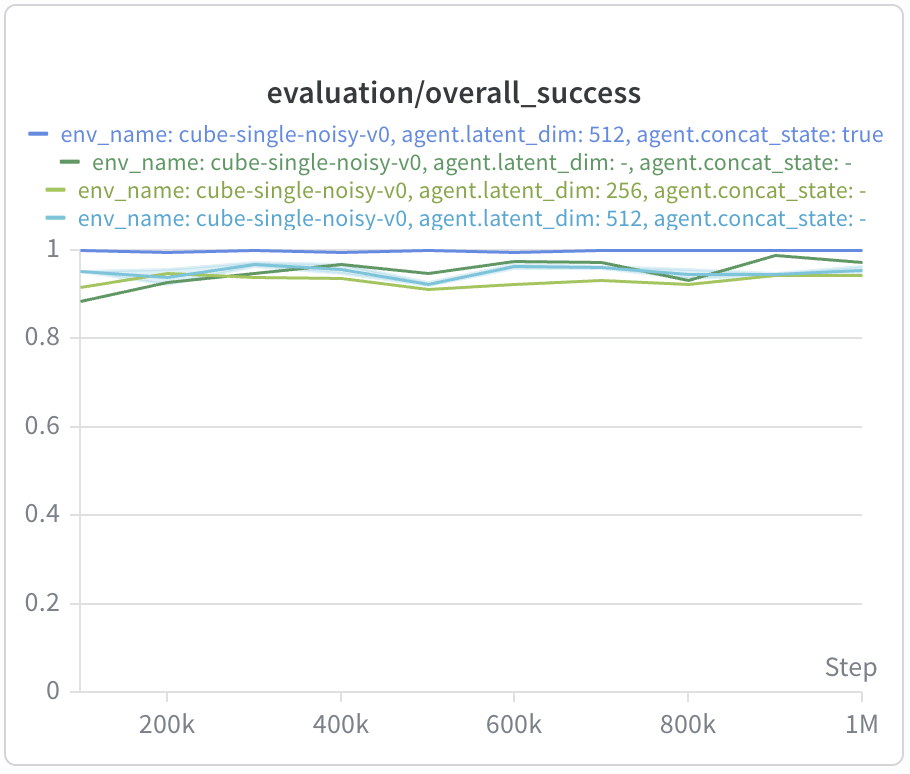
The speed of convergence and stability of BVF with concatenated state is especially outstanding — reaching stable convergence to 100% success by 200k training steps.
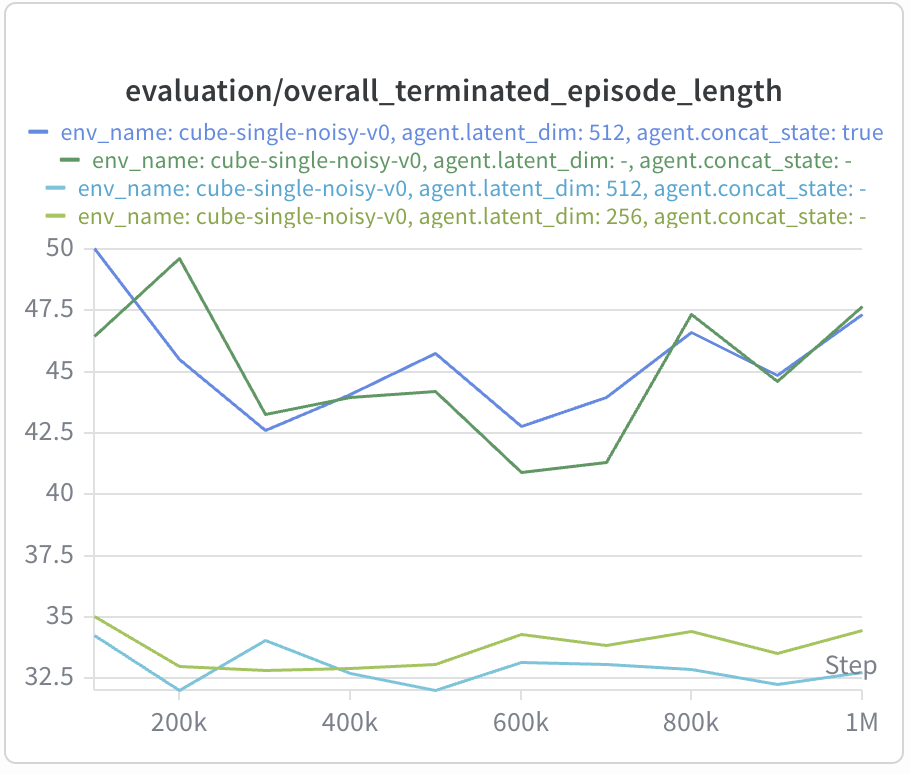
In cube-single-noisy, BVF + $\psi(s,g)$ reaches 100% success immediately and
remains there during training, but is significantly slower with a similar
throughput/execution speed as the original monolithic value function.
In cube-single-play, we observe both degraded performance and significantly
slower execution compared to late fusion: